지난달 17일 한국로봇학회가 개최한 ‘제17회 한국로봇종합학술대회’에서 우리 학교 김영건(기공·3) 학우와 이유성(기공·4) 학우가 우수 논문상을 수상했다.
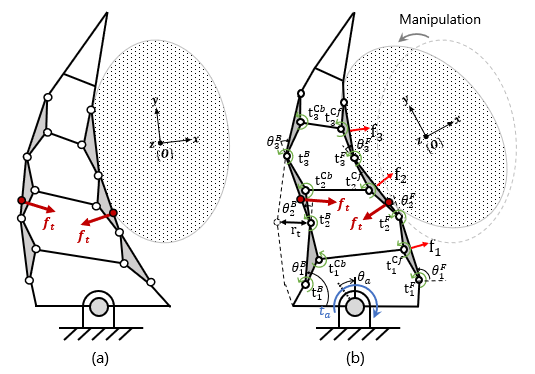
김 학우와 이 학우는 ‘다물체 파지와 조작이 가능한 로봇 그리퍼 설계’를 주제로 발표했다. 해당 주제의 주된 내용은 다양한 형상의 물체를 안전하게 잡는 것이 가능하면서 동시에 원하는 방향으로 조작하는 기능까지 구현 가능한 로봇 그리퍼다. 김 학우는 “FinRay 그리퍼는 소프트 그리퍼이기에 물체를 잡을 때 물체 형상에 알맞게 적응형 파지가 가능해 물체 파지뿐만 아니라 물체 조작도 가능하겠다는 아이디어에서 출발했다”고 밝혔다. 논문에서 그리퍼의 구동 자유도 추가에 따른 물체 조작 가능성을 제시했다. 또한 기구학 분석과 유한요소해석을 통해 조작에 필요한 힘의 위치와 방향을 최적화하고 실험을 통해 물체 조작 가능성을 확인하는 과정을 담았다. 이 학우는 해당 주제에 대해 연구하면서 “다양한 그리퍼를 연구하면서 사람 손으로는 당연한 기능을 그리퍼로 구현하기는 정말 어렵다는 사실을 알게 됐다”며 “하지만 그리퍼 연구는 넓은 가능성을 열어두고 도전할 수 있기 때문에 그리퍼 연구에 큰 매력을 느꼈다”고 전했다.
두 학우는 지도 교수인 김의겸(기공) 교수가 연구와 논문 작성 과정에서 도움을 줬다고 덧붙였다. 김 교수가 제시한 개선할 점을 수용해 그리퍼를 조작한다는 아이디어를 직관적으로 보여줄 수 있도록 그림에도 노력을 기울였다.
김 학우는 “연구하던 주제로 논문을 써서 학술대회에 제출해보는 데에 의의를 두고 참가했다”며 “좋은 평가를 받아 수상까지 하게 돼 정말 감사하고 영광이다”며 수상 소감을 전했다. 이 학우도 “좋은 성과를 거둔 만큼 아이디어 제시 단계에서 앞으로는 실제 기능 구현을 위해 단계적으로 발전시켜 나갈 계획이다”며 “추후 연구가 잘 진행해 또다시 좋은 소식을 전할 수 있도록 노력하겠다”며 앞으로의 포부를 밝혔다.
TIP
그리퍼: 사람의 동작을 흉내 내는 동작감지기이며 자동화 모션에서 사람의 손가락과도 같은 역할을 하는 제품